Il Laboratorio di Robotica svolge attività di ricerca in diversi campi della robotica avanzata. Le attività scientifiche e tecnologiche del Laboratorio si possono raggruppare in quattro aree, le cui caratteristiche sono riassunte di seguito.
Robotica mobile terrestre
In questo campo sono stati sviluppati molti progetti riguardanti sistemi robotici autonomi per applicazioni di sorveglianza e sicurezza, conservazione del patrimonio culturale e assistenza agli anziani ed ai diversamente abili. In quest’ambito sono stati sviluppati algoritmi per la navigazione autonoma, visione a artificiale, il riconoscimento di pattern nonché di cooperazione tra robot.

 Visione attraverso display che mostra informazioni aggiuntive (dati multispettrali da LIF) sovrapposte a quelle ottiche, indipendentemente dal movimento dell’operatore.
Visione attraverso display che mostra informazioni aggiuntive (dati multispettrali da LIF) sovrapposte a quelle ottiche, indipendentemente dal movimento dell’operatore.
Interfaccia uomo-macchina, teleoperazione e telemanipolazione
Accanto alla teleoperazione, da sempre tema del laboratorio nato per sviluppare telemanipolatori per impianti nucleari, è stata studiata la progettazione meccanica ed elettro-termica di interfacce neurali invasive micro attuate basate su smart materials per la connessione tessuto vivente-attuatore meccanico. Attività collaterali sono state lo studio e analisi dei segnali neurali registrati in-vivo tramite tecniche avanzate di signal processing e lo sviluppo di interfacce neurali a film sottile di nuova generazione. La robotica contribuisce anche alla fruizione avanzata dei beni culturali mediante la realtà aumentata e tecniche di analisi e classificazione.
Sistemi sensoriali
Il Laboratorio ha sviluppato una sensoristica innovativa che usa la radiazione elettromagnetica nella banda dell’infrarosso e dispositivi wireless allo scopo di fornire elementi cognitivi per la modellazione del contesto da parte dei non vedenti. Nel settore automotive è stato realizzato un ausilio per le persone presbiacusiche.
Robotica mobile subacquea e aerea
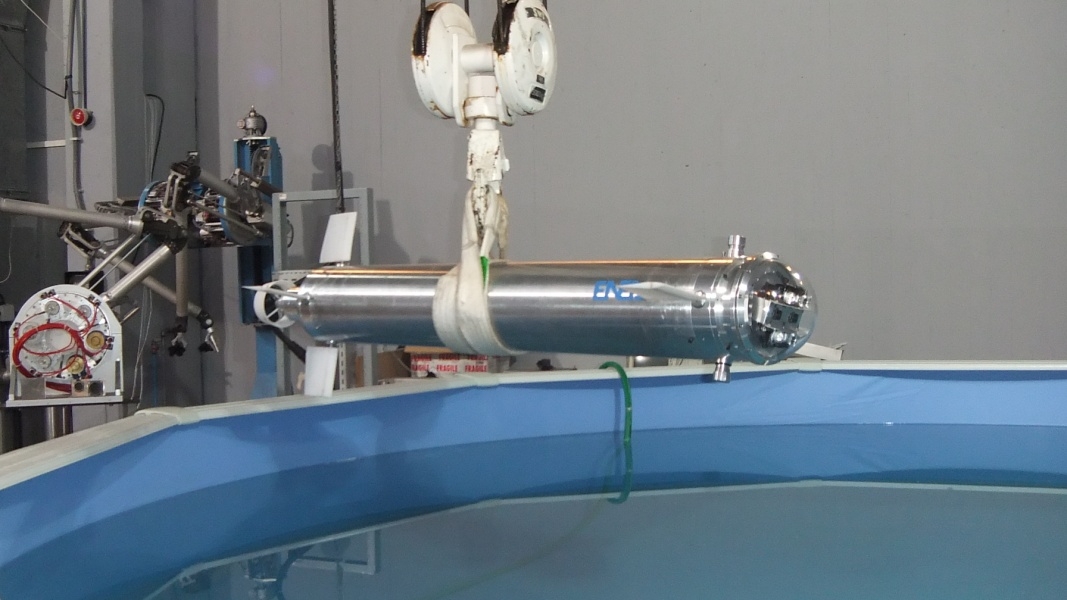
Il Laboratorio è, nel periodo corrente, principalmente impegnato nello sviluppo di uno “sciame” di robot sottomarini autonomi finalizzato alle comunicazioni e alla “security” ma di interesse anche per la ricerca e lo studio di Beni Culturali sommersi. I sistemi robotici autonomi costituiscono uno strumento potente per la ricerca e la localizzazione di reperti archeologici sottomarini. I sistemi VENUS, elementi dello sciame, disegnati dall'ENEA e tutt'ora in fase di sviluppo, lavorano con il concetto di swarm, offrendo maggiore robustezza e velocità di esplorazione rispetto ad un singolo robot per quanto sofisticato. I punti chiave sono: un sistema di controllo distribuito, nuove strategie di comunicazione subacquea e lo sviluppo di un prototipo sottomarino economico. I robot sono in grado di costruire mappe digitali dei siti archeologici e dargli una struttura utilizzando non solo immagini visive ma combinandole con dati di altri strumenti, quali LIF (laser induced fluorescence), ultraacoustical devices etc. per generare immagini iper realistiche di realtà aumentata che forniscono all’osservatore diversi livelli di lettura contemporaneamente e migliorano il livello di fruizione, con l’ausilio tecniche di analisi e classificazione automatica delle caratteristiche rilevate.

Robot Venus, elemento dello sciame in navigazione
