
ARROWS (Archaeological Robots for the World's Seas) è un progetto della durata di tre anni finanziato dall'Unione Europea nell'ambito del del settimo programma quadro per la ricerca e lo sviluppo tecnologico con una call specifica sullo sviluppo di tecnologie avanzate e strumenti per la mappatura, la diagnostica e lo scavo di siti archeologici sommersi e costieri.
Il progetto è stato portato avanti da un consorzio costituito da 10 partner tra università, enti, centri di ricerca ed aziende: Università di Firenze, ISTI-CNR di Pisa, Tallinnaa Tehnikaulikool (Tallinn, Estonia), Heriot-Watt University (Edinburgh, Regno Unito), Edgelab S.R.L. (La Spezia), Albatros Marine Technologies S.L. (Maiorca, Spagna), Nesne Elektronik (Izmir, Turchia), TWI Ltd (Cambridge, Regno Unito), Regione Sicilia, Eesti meremuuseum (Tallinn, Estonia). Il team è quindi molto multidisciplinare e comprende esperti di archeologia subacquea, ingegneria subacquea, robotica, elaborazione e riconoscimento delle immagini.
In questi anni ARROWS ha voluto proporre di adattare e sviluppare veicoli subacquei autonomi e a basso costo (AUV - Autonomous Underwater Vehicle) per ridurre in maniera significativa il costo delle operazioni archeologiche coprendo l'intera estensione della campagna archeologica. Il progetto vuole dimostrare un portfolio illustrativo di questo tipo di applicazioni.
L'approccio è quello di rispondere alle esigenze degli archeologi in tutte le fasi della campagna, identificare i problemi e proporre soluzioni tecnologiche con livelli di prontezza che predicano il loro sviluppo ed applicazione in 3-5 anni.
Singole tecnologie sono state sviluppate durante il corso del progetto utilizzando un metodo di sviluppo agile comprendente cicli rapidi di test e confronto tra le richieste degli utenti finali.
Per assicurare una grande fruibilità dei risultati sono state definite le richieste e testate le soluzioni in due contesti significativi a livello storico ma molto differenti da un punto di vista ambientale: il Mar Mediterraneo e il Mar Baltico.
Esplorazione sottomarina con robot MARTA
Si è voluto perseguire sviluppi immediati, a basso rischio e di lungo termine, in particolare:
- rilievi orizzontali veloci a basso costo di grandi aree che utilizzano AUV personalizzati con rilevamento multimodale.
- strumenti di analisi di dati semiautomatici veloci e a basso costo per ricollocazione di sito ed oggetto
- Mappe di alta qualità per migliori metodi di ricostruzione d'immagine e migliori abilità di localizzazione di AUV
- Penetrazione Shipewreck e mappatura interna utilizzando piccoli veicoli a basso costo utilizzando "pinger" fissi.
- Strumenti di scavo delicato per la diagnosi e lo scavo di oggetti fragili
- Ambienti di realtà mista per l'esplorazione virtuale di siti archeologici.
- Metodi di intrusione attiva e rilevazione
Negli ultimi mesi alcuni test in mare sono stati compiuti nelle acque della Sicilia vicino all'isola di Levanzo e vicino all'isolotto di Maraone. Ben 6 sono gli AUV sperimentati, di cui uno solo commerciale (un IVER3) e gli altri prototipi, di cui tre realizzati dall'Università di Firenze: Tifone 1, Tifone 2 (foto in alto), MARTA.


URobot U-CAT e MARTA
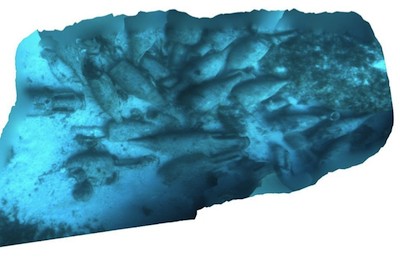
In Sicilia il team ha lavorato in collaborazione con gli Archeologi della Soprintendenza del mare realizzando alcuni rilievi di tipo sonar su siti non ancora classificati, nonché video su siti già noti. Le attività si sono concentrate sul relitto "dello zolfo" vicino a Maraone e il sito di Cala Minnola.
Una seconda dimostrazione si terrà in Estonia dal 17 al 23 luglio ed è previsto l'impiego di 4 AUV di cui due commerciali e due prototipi, in particolare:
- l'U-CAT, robot biomimetico di piccole dimensioni, realizzato dall'Università Tecnica di Tallinn;
- MARTA (MArine Robotic Tool for Archaeology), realizzato dall'Università di Firenze.
Per l'occasione verrà prodotto un video finale del progetto che segue quello di mid-term prodotto l'anno scorso riportato in fondo alla notizia.
Sito web: www.arrowsproject.eu
Approfondimenti
- Intervista al Prof. Benedetto Allotta sul sito Cordis
- Un robot tartaruga per l'archeologia subacquea
- Il Robot Tifone in missione di archeologia subacquea in Israele
Fonte: Benedetto Allotta, Unifi